Le plus petit robot marcheur a la taille d’une puce – Une équipe de scientifiques de l’université de Northwestern a mis au point le plus petit robot marcheur contrôlable à distance dans l’objectif de démontrer l’intérêt des miniatures et des machines à taille réduite.
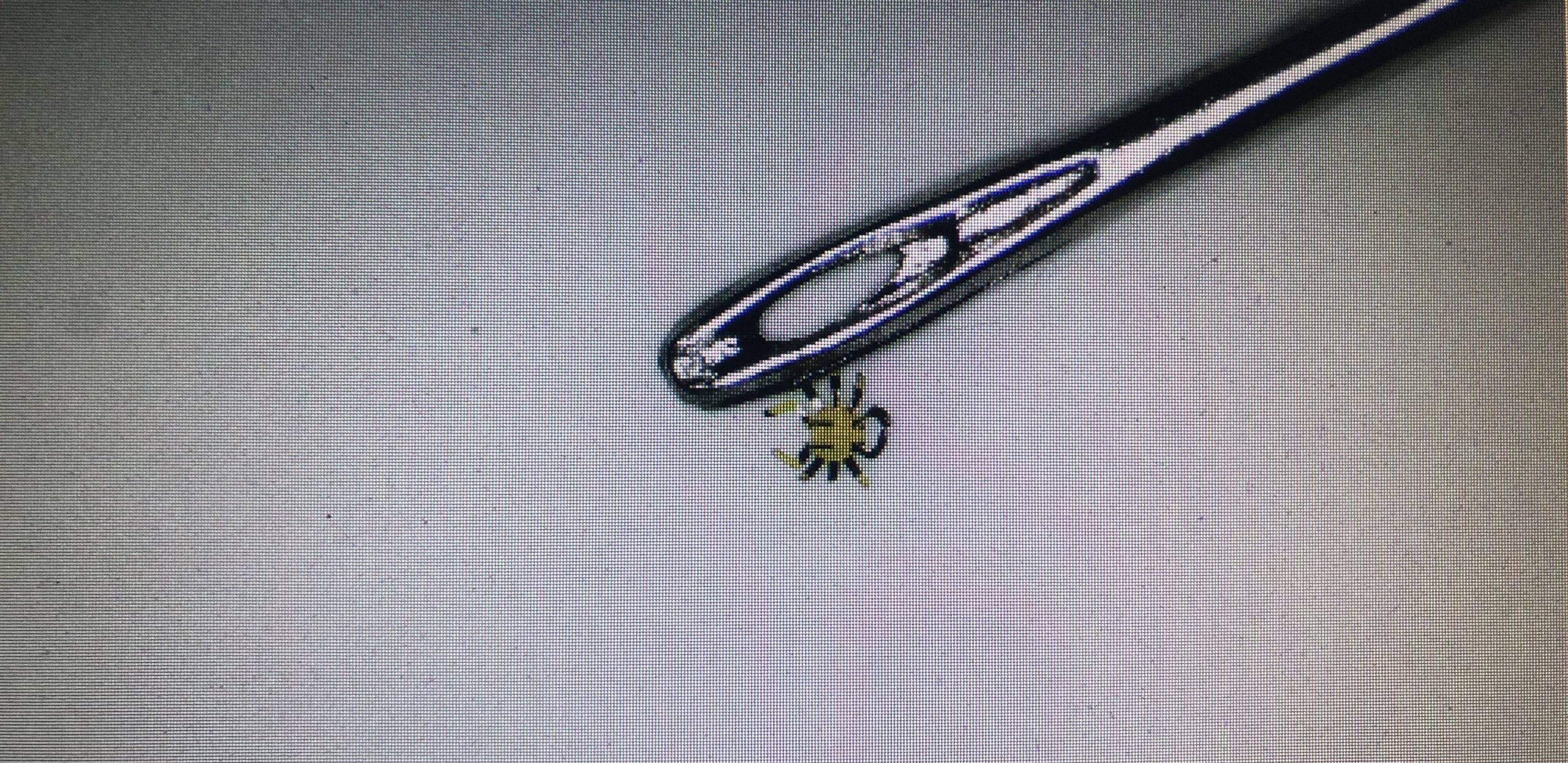
En effet, avec son demi millimètre de long, l’engin en forme de crabe peut aisément et littéralement passer à travers le chas d’une aiguille tout en ayant la possibilité de se plier, de tourner, de sauter et de ramper.
Ce minuscule robot qui ressemble véritablement à un crabe, avec ses dix pattes, a été imaginé par John A.Rogers, un professeur de bio-électronique de l’Université de Northwestern. Plus petit qu’une puce, le robot ne consomme que peu d’énergie, tout en étant facilement rechargeable.
Pour mettre au point l’engin John Rogers et ses collègues ont eu recours à la résilience élastique de son corps. Pour ce faire, les ingénieurs travaillant sur ce projet ont utilisé un alliage qui reprend la forme «mémorisée» du robot lorsqu’il est chauffé. Grâce à ce procédé, les chercheurs ont pu créer une locomotion dès lors qu’ils ont pu faire en sorte que la micromachine se souvient de sa forme initiale.
Assistant chirurgical ?
À quel usage est destiné un robot aussi minuscule ? Ses concepteurs estiment, dans la revue scientifique universitaire, que ce robot est «une porte ouverte pour de multiples fonctions». Le caractère microscopique de l’engin peut être un atout de taille. Le robot pourrait effectuer des missions dans des espaces confinés et parfois inaccessibles, particulièrement dans l’industrie ou encore dans le secteur de la santé.
Lorsqu’ils sont interrogés à ce propos, les chercheurs ayant travaillé à la conception de ce robot évoquent la possibilité de l’utiliser pour réparer ou assembler de petites structures ou des machines dans des usines. Selon John Rogers, l’engin pourrait aussi servir d’assistant chirurgical pour nettoyer les artères obstruées, arrêter les saignements internes ou encore éliminer les tumeurs cancéreuses.
En ce qui concerne la mobilité, pour l’instant, d’après Yonggang Huang qui a dirigé les travaux théoriques, la technologie permet au robot de marcher à une vitesse moyenne équivalente à la moitié de sa longueur corporelle par seconde.
L’équipe de Northwestern s’est déjà illustrée en créant des robots faisant le double de la taille de celui-ci ressemblant à des vers de terre et des coléoptères.
En septembre dernier, la même équipe avait présenté dans un article en libre accès de la revue Nature la plus petite structure volante conçue par l’être humain.